Make Astronaut's smile (MarsBot)

This idea has been brought to life

I am 9 years old. I have participated in 27 hackathons so far. I won the Canadian Space Apps Challenge 2017 and was in Global 25 in 2018 NASA Space Apps Challenge.
I am the co-founder of HotPopRobot which brings projects on space and science to the NextGen. I am the Youth Committee Member of the Royal Astronomical Society of Canada.
I have made over 25+ space projects which have been displayed at Maker Festival Toronto, Ontario Science Centre, Toronto International Film Festival, MakerExpo, Science Rendezvous, MakerFest (Delhi) and other places.
I am bilingual in French and English.
We can all feel a bit lonely sometimes, so imagine being stuck for months on end in space away from your family and friends! The MArS bot is there to lend a supporting high five when you need it most!

Blog entries

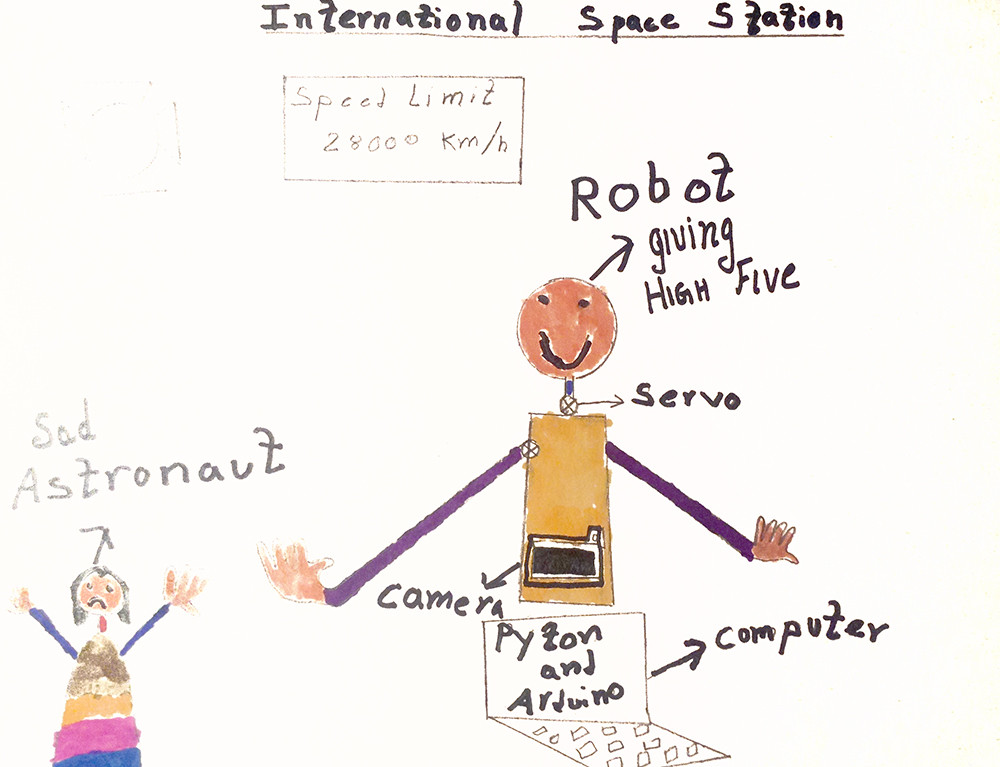
MArSBot was my first project that combined Arduino, Python and Artificial Intelligence (AI). Life on the International Space Station can be hard for Astronauts as they are away from their families and kids. My MArSBot scans the faces of Astronaut on the International Space Station and uses AI algorithm to see if anyone is feeling sad. It then gives them a high five!
It took me several weeks to make. As with all projects I like to make a drawing using paper and pencil. I then start to think of materials I will use to make my project and the programming I need to do to make my robot move. The project is now complete. It is one of my big projects and I am very happy with it. But I want to improve this project so that the Bot will be able to smell its surroundings and be able to say if a flower smells good or not.
I tested it many times and made changes to the code in Arduino and Python. It took me lots of attempts to transmit correct information from Python to Arduino. I found out that you have to close the python console before you upload the Arduino code as both use the same COM port. Next time I need to learn how to create a separate COM Port for 2 projects using the same computer.
I had to place the horns of the servo at the right place because they can only go 180 degrees (half a circle). They had to be aligned so that the robot's hands and the robot's face displayed the correct movements depending on the happy or sad emotions detected by the robot. Both the arms also had to go up the same height. So I had to do lots of adjustments in the code. As there were lots of servos to control, the code became really long but then I learned about naming the servos creatively which made it easier to remember them.
I had to decide where I will attach the head and the arms. I had to make changes in the wiring to make all 6 servos work. As the servos require a lot of power, I had to attach an external 6 volts power supply to the servos.